GdPlanningAI
An asset by wahaha_yes
Install Asset
Install via Godot
To maintain one source of truth, Godot Asset Library is just a mirror of the old asset library so you can download directly on Godot via the integrated asset library browser


Quick Information

GdPlanningAI
An advanced game AI framework, based on Goal Oriented Action Planning (GOAP), and implemented in Godot.**NOTE: The Godot Asset Library tries to import this addon at the top folder of your project because I have set it up to be better as a git submodule. If installing through the asset library, make sure to click *Change Install Folder* and put the addon in `addons/GdPlanningAI`.**
Supported Engine Version
4.4
Version String
0.1.4
License Version
Apache-2.0
Support Level
community
Modified Date
12 days ago
Git URL
Issue URL

GdPlanningAI
GdPlanningAI (shortened as GdPAI) is an agent planning addon for Godot that allows you to build sophisticated AI agents for your game world. These agents are able to reason in real-time and plan actions based on their own attributes and nearby interactable objects.
This framework is originally based on Goal Oriented Action Planning (GOAP), a planning system developed by Jeff Orkin in the early 2000's. GOAP has been used in many games since; some popular titles using GOAP systems include F.E.A.R., Fallout 3, and Alien Isolation. This framework started as a reimplementation of GOAP. I noticed some areas for improvement and expanded the planning logics and place more emphasis on interactable objects.
The original motivation and "making of" process is covered here:

Installation
This repo is set up to function as a git submodule. If you are not familiar with using submodules to maintain Godot plugins, they help with disentangling this project's updates with your own. This project can be added to your project directory and used without being tracked or overwritten by your own version control.
To install this addon as a git submodule, navigate to the top of your Godot project and run:
git submodule add https://github.com/WahahaYes/GdPlanningAI.git addons/GdPlanningAI
Then, inside the project editor, go to Project -> Project Settings -> Plugins and enable the GdPlanningAI addon.
Release versions will also be available on the Godot asset library https://godotengine.org/asset-library/asset.
Script Templates
A number of useful templates are included in the script_templates folder. They guide usage when subclassing Action, Goal, GdPAIObjectData, etc. The addon does not automatically copy these over at the moment, but it is highly recommended to use these templates. If you'd like to take advantage of these, please copy the folders inside addons/GdPlanningAI/script_templates to your project's templates folder (by default this is res://script_templates).
Usage
In this framework, agents form chains of actions at runtime rather than relying on premade state change conditions or behavior trees. This can greatly reduce the amount of developer overhead when creating AI behaviors, but it is a more complex / less intuitive system.
GdPAIAgent
In this framework, each GdPAIAgent maintains two GdPAIBlackboard instances storing relevant information about their self and the broader world state. An agent's own blackboard is used to maintain their internal attributes. Possible attributes include health, hunger, thirst, inventory, etc. The world state maintains common information, like time of day and information about interactable objects in-world (see GdPAIObjectData description below).
Goal
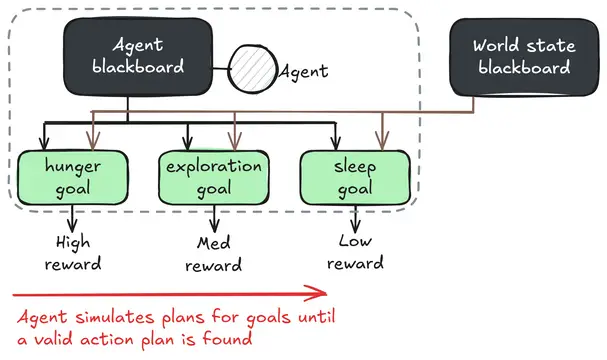
Agents are driven by Goals. An agent will balance however many goals it is assigned it tries to maintain based on priority. Given the agent and world states, a reward function is computed for each goal. When planning, the agent pursues the most rewarding goal that is currently achieveable. When designing goals, it is important to create dynamic reward functions so that the agent prioritizes different goals based on its needs (such as making a hunger_goal reward equal to 100 - current_hunger, adding more priority the hungrier the agent gets).

Plan
When an agent attempts to form a Plan, it essentially takes a snapshot of the current environment and simulates what would occur if various actions were taken. The simulation creates temporary copies of all relevant action, blackboard, worldstate, and object data. The copies exist outside of the scene graph, so here the planning agent is free to experiment and manipulate data attributes to test out various action sequences.
The below image gives a simple visual example for a planning sequence. The agent's goal is to reduce hunger, which is ultimately resolved by eating food. A prerequisite to eat food is to pick up the food, so the agent must first move towards the food.

Note that planning actually occurs in reverse based on whether actions are viable for satisfying the plan or following actions. This constrains the agent's exploration to only consider efficient, relevant actions. The alternative would be a breadth-first search over a potentially huge state space. In the above example, the agent first determined that the food on the map could decrease its hunger. Then, the pseudo-goal became to determine how that food could be eaten (-> by going towards it).
Action
Plans are formed by chaining Actions. After planning, these function similarly to leaf nodes of behavior trees, in that they do concrete actions. For planning, actions have an additional set of Preconditions which are used to determine valid actions and pathfinding chains of actions.
An action has its preconditions organized via Action.get_validity_checks() and Action.get_preconditions(). Validity checks are hard requirements which need to be true in order for the action to be considered at all during planning. An example validity check is that the agent's blackboard contains a hunger attribute for a eat_food action.
Precondition
Preconditions in Action.get_preconditions() are dynamic and necessary for the planning logic. These are conditions that may not be true yet, but could be satisfied by other actions earlier on in a plan. In the earlier example, a precondition for an eat_food action could be that the agent is holding food. A pickup_object action satisfies this but has its own object_nearby precondition. The goto action satisfies this and has no preconditions of its own (maybe goto had a validity check that the object in question was on the navmesh, which returned true). By chaining preconditions together, the agent determined the chain of goto -> pickup_object -> eat_food as a valid solution.
The Precondition class evaluates a lambda function eval_func(agent_blackboard: GdPAIBlackboard, world_state: GdPAIBlackboard). Please check the implemented preconditions in the example setup to get an understanding of how they can be written. There are also a number of static functions in Precondition for common conditions. If you find yourself commonly creating preconditions of a certain format, please suggest an inclusion to the Precondition class or make a pull request!
GdPAIObjectData
The final major component of this framework, and the most novel improvement over GOAP, is the inclusion of GdPAIObjectData. This framework introduces an object-oriented approach where interactable objects broadcast the actions they provide. Each subclass of GdPAIObjectData may broadcast its own action and functionality, and the composition of multiple of these under a single object results in an object that's usable in multiple ways.
In addition to an agent's self-actions, which are not dependent on external factors (for example, maybe an agent has the action to rest to regain stamina), these GdPAIObjectData broadcast their relevent actions. A banana object may broadcast the eat_food action. The relevant subclass of GdPAIObjectData contains a hunger_restored attribute that the eat_food action references. Through a validity check, the eat_food action ensures that agents have a hunger property, to prevent unnecessary computations for agents that don't become hungry.
The templates in script_templates and the demo in examples/.. are verbosely commented to help with initial understanding of the framework. Using the script templates is highly recommended when creating your own actions, goals, and object data classes.
SpatialAction
To streamline object interactions, the SpatialAction class bundles agent movement to an interactable object with a concrete action. This is a helper subclass which aims to overcome an issue brought up with the original GOAP implementation - without careful design, actions which are strongly coupled might explode the planning complexity. In GOAP, the issue they ran into was with readying and firing a weapon. A weapon always has to be ready before it can be fired, so having these as separate actions greatly expanded the search space. In prototyping, I noticed the same for goto and object interactions. The agent must be near the object first, but with the option to simulate movement anywhere during planning, it became very slow for the agent to determine where it should be. SpatialAction handles the logic for movement, then the subclass's implementation kicks in when the agent arrives at the object.

The SpatialAction class adapts to 2D or 3D depending on the location node specified on the object's GdPAILocationData. SpatialAction has its own script_template that is expanded for this behavior; it is highly recommended to use the template.
Demos
Demos with sample actions and objects are located in GdPlanningAI/examples. Currently, there is a simple setup consisting of food objects and fruit trees. The agents' only goal is to satisfy hunger. Eating fruit will grant hunger, and shaking fruit trees will spawn fruit. There is a delay interval before trees can be shaken again. examples/2D/single_agent_demo.tscn shows a single agent and examples/2D/multi_agent_demo.tscn has two agents competing for the available food. As an exercise, consider adding new goals and actions to this starting point!

NOTE: There's an open todo related to improving the pixel art for these demos. If anyone's interested, it'd be a fun way to contribute!
License
GdPlanningAI, Copyright 2025 Ethan Wilson
This work is licensed under the Apache License, Version 2.0. The license file can be viewed at LICENSE.txt and at http://www.apache.org/licenses/LICENSE-2.0.
TODOs
The framework is stable for creating planning agents but is still in an early phase of development. I plan to make additions as I work on my game projects, and I am open to feedback or contributions from the community! Please raise issues on the Github to discuss any bugs or requested features, and feel free to fork the repo and make pull requests with any additions.
Here is a running list of todo items (if anyone wants to claim one, like logo or sprite artwork, please let me know!):
- Making a true project logo! I quickly threw something together, but welcome a more professional looking logo.
- Making icons for the custom nodes that have been introduced. Not that important for functionality, but they'd look nice!
- Updating the demo scene's assets. I threw together some very quick pixel art so that I wouldn't need to worry about licensing issues, but they could use an upgrade!
- Creating a visual debugger similar to Beehave or LimboAI's debuggers for behavior trees.
- Multithreaded agent planning. In simple contexts this may not be needed, but longer planning sequences could bottleneck the main thread and lead to stutters. Single or multithreading will be specifiable per agent.
- A more complicated demo scene. Because the current demo uses SpatialActions, which bundle movement in with eating, the actual planning is very simple, and most plans contain a single action.
- Tutorial video.
FAQs
Ask me questions! If broadly relevant I'll add the Q&A here!
An advanced game AI framework, based on Goal Oriented Action Planning (GOAP), and implemented in Godot.
**NOTE: The Godot Asset Library tries to import this addon at the top folder of your project because I have set it up to be better as a git submodule. If installing through the asset library, make sure to click *Change Install Folder* and put the addon in `addons/GdPlanningAI`.**
Reviews
Great asset of creating intelligent NPCs!
wahaha_yes
Rated positive
I made the addon so I'm biased, but this can greatly accelerate the workflow to make NPC behaviors, without having to deal with messy state machine transitions or the developer hours needed to organize behavior trees.
Quick Information
GdPlanningAI
An advanced game AI framework, based on Goal Oriented Action Planning (GOAP), and implemented in Godot.**NOTE: The Godot Asset Library tries to import this addon at the top folder of your project because I have set it up to be better as a git submodule. If installing through the asset library, make sure to click *Change Install Folder* and put the addon in `addons/GdPlanningAI`.**
Supported Engine Version
4.4
Version String
0.1.4
License Version
Apache-2.0
Support Level
community
Modified Date
12 days ago
Git URL
Issue URL