Naive Behavior Tree Plugin
An asset by Raiix
Install Asset
Install via Godot
To maintain one source of truth, Godot Asset Library is just a mirror of the old asset library so you can download directly on Godot via the integrated asset library browser
Quick Information

Naive Behavior Tree Plugin
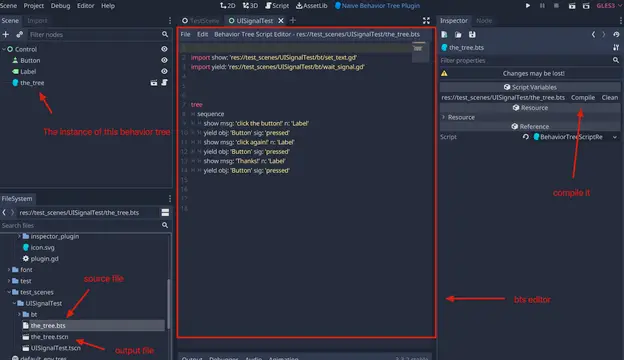
Maybe you love coding more than visual things, this may be what you want.Compile a behavior tree script, and turn it into a PackedScene file which contains a behavior tree.
Supported Engine Version
3.3
Version String
1.1
License Version
MIT
Support Level
community
Modified Date
4 years ago
Git URL
Issue URL
A Naive Behavior Tree Plugin
Compile a behavior tree script, and turn it into a PackedScene file which contains a behavior tree.
Introduction
The code of BTNode part in this project is literally a copy of this project: https://github.com/libgdx/gdx-ai/wiki/Behavior-Trees.
The compiler part is designed by myself, so it might have a lot of bugs. XD
More tests need to be done, so that it can actually be used in a real project.
The BTS is refer to Behavior Tree Script.
Syntex
line = [[indent] [guardableTask] [comment]]
guardableTask = [guard [...]] task
guard = '(' task ')'
task = name [param:value [...]] | subtreeRef
Behavior Tree Nodes
BTNode
All behavior tree nodes inherit from this node.
BehaviorTree
It stores the root node, and the agent storing your custom game object which can be used in BTNode like this: tree.agent.
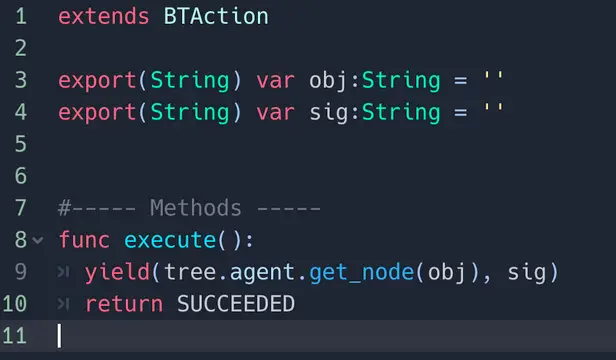
BTAction
Refer to an action. Your custom node should inherit from this node.
Example:
tool
extends BTAction
export(String) var msg:String
#----- Methods -----
func execute():
print(msg)
return SUCCEEDED
You need to override execute() function in order to implement your custom function.
In this function, you can use tree to access the Behavior Tree itself, tree.agent to access your custom game object.
Return SUCCEEDED to indicate the action is done, FAILED is fail, RUNNING is running.
You can also use yield to wait for a signal in this function, which is considered a 'running' status.
An example implemented a timer using yield:
tool
extends BTAction
export(float) var wait:float = 1
#----- Methods -----
func execute():
print('wait for 1 sec')
yield(get_tree().create_timer(wait), "timeout")
print('wait for 2 sec')
yield(get_tree().create_timer(2), "timeout")
print('wait for 3 sec')
yield(get_tree().create_timer(3), "timeout")
print('done.')
return SUCCEEDED
More Example
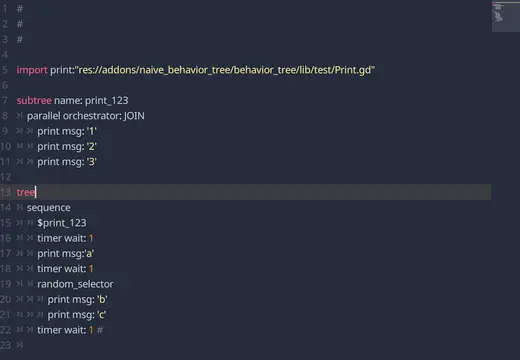
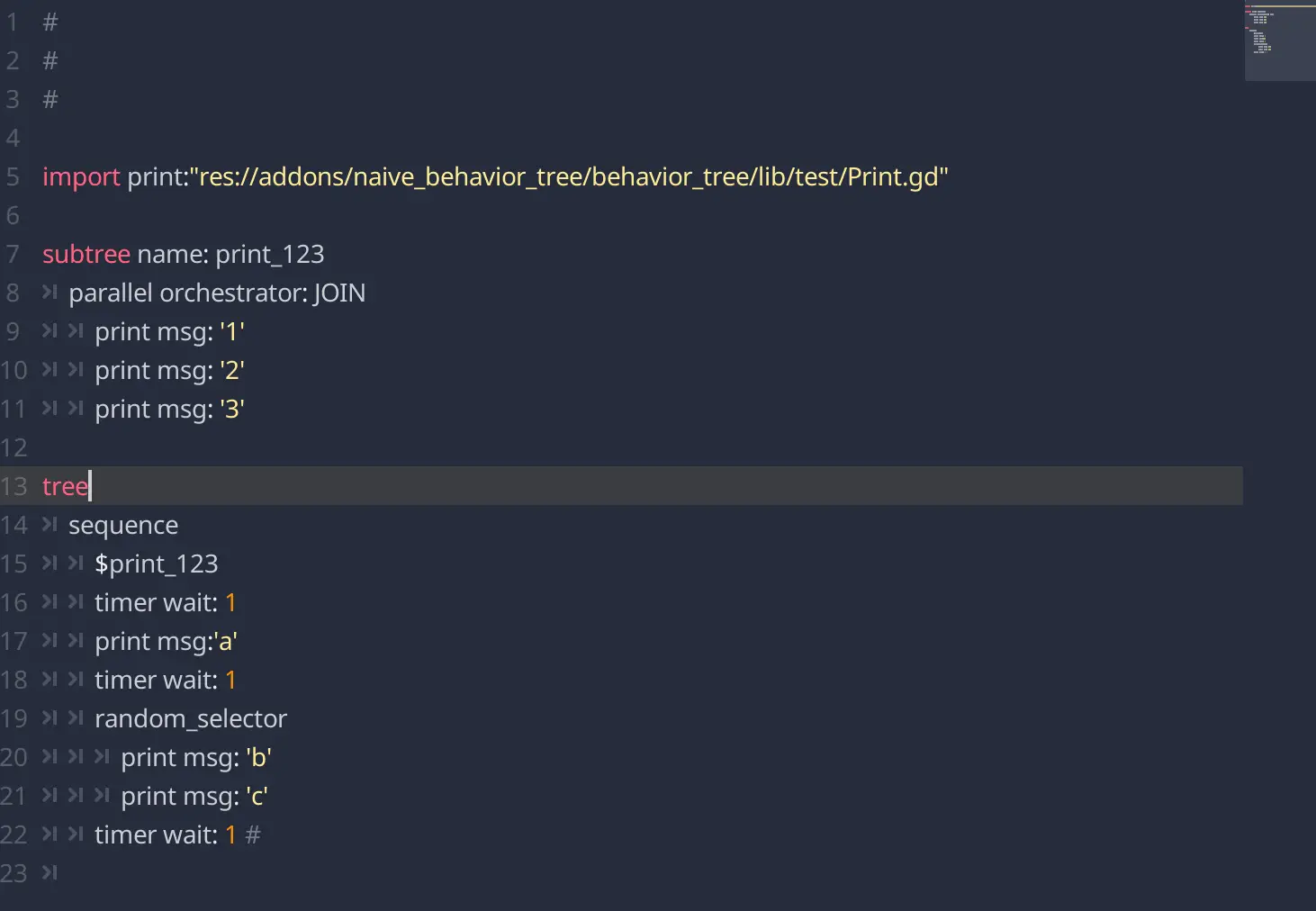
# Comment
import alias: "path/to/your/custom/behavior/tree/node.gd" # Import custom node
import dead?: "path/to/your/custom/behavior/tree/node.gd" # Yes, you can use '?' as an ID or alias name.
subtree name: xxx # Define a subtree, the first node is root, use indent to indicate the relation of parent or child node.
parrallel orchestrator: JOIN # the left of ':' is parameter,the right is an expression that eval at complie time
alias
alias
tree # A bts file can only contain at least one tree. Same as the subtree.
sequence
$xxx # Refer to a subtree
(dead?) alias # use 'dead?' as a guard.
#
# The behavior tree of a dog.
#
import bark:"res://dog/bt/BarkTask.gd"
import care:"res://dog/bt/CareTask.gd"
import mark:"res://dog/bt/MarkTask.gd"
import walk:"res://dog/bt/WalkTask.gd"
subtree name: caretree
parallel
care times: 3
alwaysFail
'res://dog/bt/RestTask' # Use a path to a gdscript directly.
tree
selector
$caretree # use '$' to refer to a subtree
sequence
bark times: randi_range(1, 3) # use a buit-in function that return a random integer between 1 and 3.
walk
"res://dog/bt/BarkTask"
Built-in nodes in BTS
# Actions
fail # Always fail
success # Always success
timer wait: 1.0 # Wait for 1 sec.
# Composites
dynamic_guard_selector # Choose a child to run at a time by guard check that succeeded.
parallel policy: SEQUENCE/SELECTOR orchestrator: RESUME/JOIN # Run all children at a time with the policy and orchestrator applied.
selector # Choose a child to run in order.
random_selector
sequence # Run children one by one in order.
random_sequence
# Decorators - wrap the result of a child.
always_fail
always_succeed
invert
random success_posibility: 0.5 # Has a chance of 0.5 to run the child.
repeat times: 1 # Repeat the child for 1 time.
until_fail # Run child until it fail.
until_success # Run child until it scceeded.
License
MIT
Maybe you love coding more than visual things, this may be what you want.
Compile a behavior tree script, and turn it into a PackedScene file which contains a behavior tree.
Reviews
Quick Information
Naive Behavior Tree Plugin
Maybe you love coding more than visual things, this may be what you want.Compile a behavior tree script, and turn it into a PackedScene file which contains a behavior tree.
Supported Engine Version
3.3
Version String
1.1
License Version
MIT
Support Level
community
Modified Date
4 years ago
Git URL
Issue URL